Flexible and Intuitive Task Specifications for Automated Warehouses
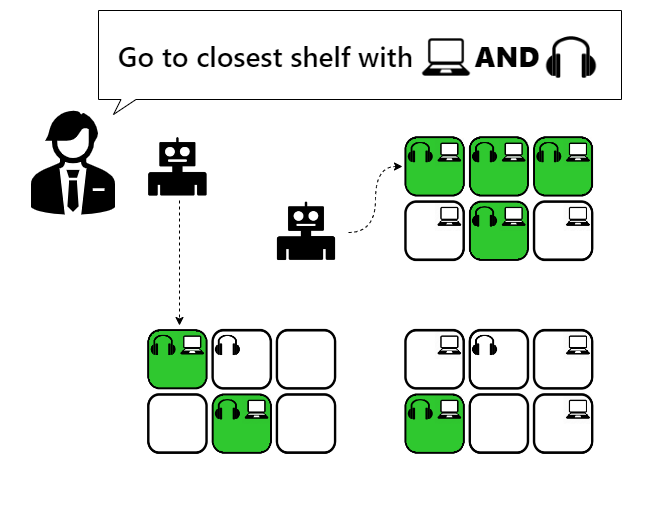
When coordinating robots in an automated warehouse, current approaches require human designers to specify exactly which storage location a robot must navigate to. This is problematic since it limits the ease of deployment and generalisation of these systems. Instead, we propose a new model in which a group of storage locations can be specified and the robots can simply be instructed to go to the closest one. We can also specify more complex tasks — for example, that each robot must go to a storage location that contains certain products and not others. This results in a system that is much more flexible, and where tasks can be easily specified by non-domain experts.
Learn more